:: VirtualDaniel ::
todo list :: future plans
friends :: people I know
galleries :: me in action
contact :: personal info
Inventor Award :: AIA
Rough estimate, we spent about 3000 man hours over a six week period building this thing. There were alot of people involved with this and I'm proud to have made my own contribution. These pictures weren't initially intended for public viewing, but I think you'll enjoy them anyways.
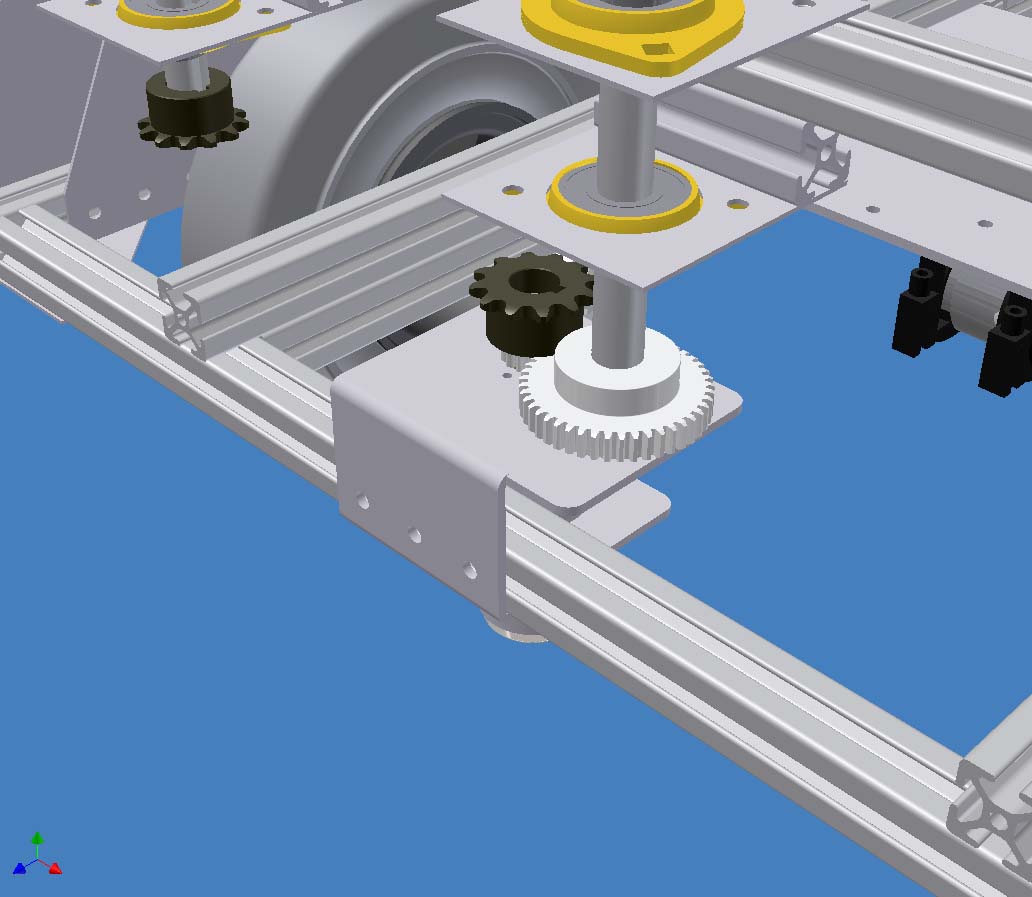 |
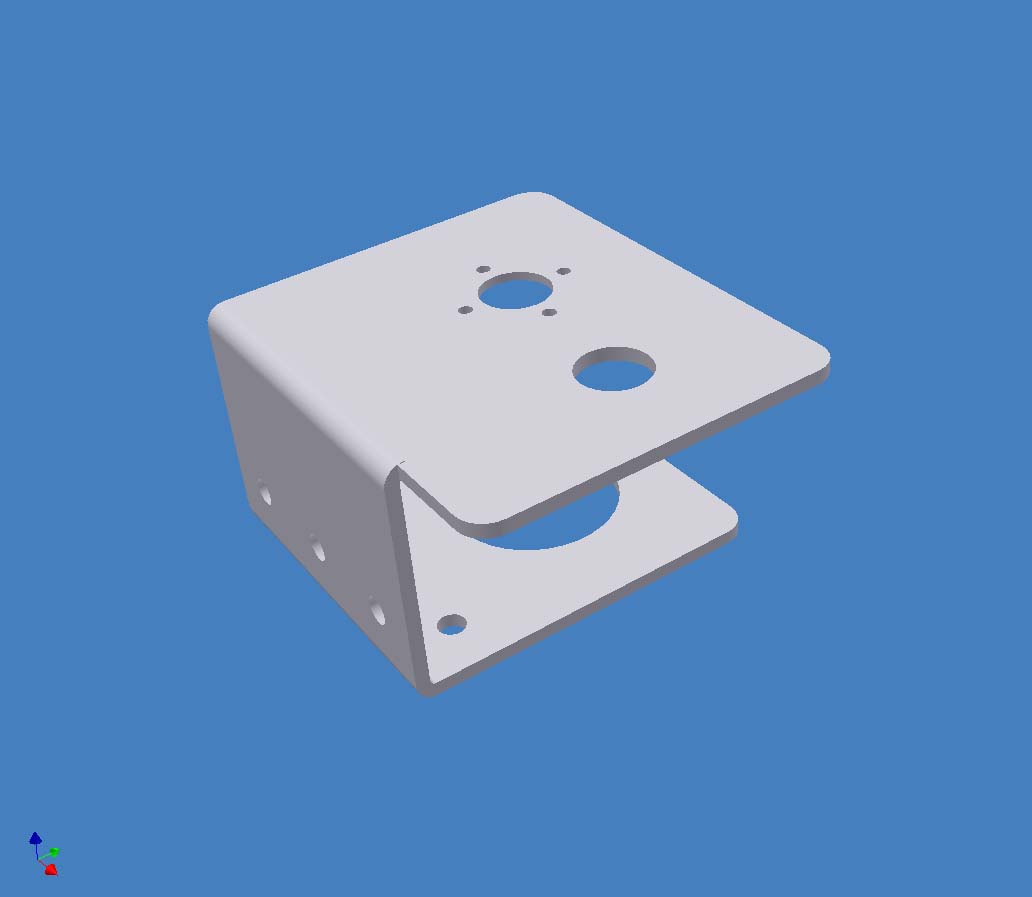
I co-authored this part of the robot, the corral, with Alex Xiao. We had some help from our advisor, Mr. Nichols, who figured out how to mount both the small gear and sprocket to the motor shaft. |
 |
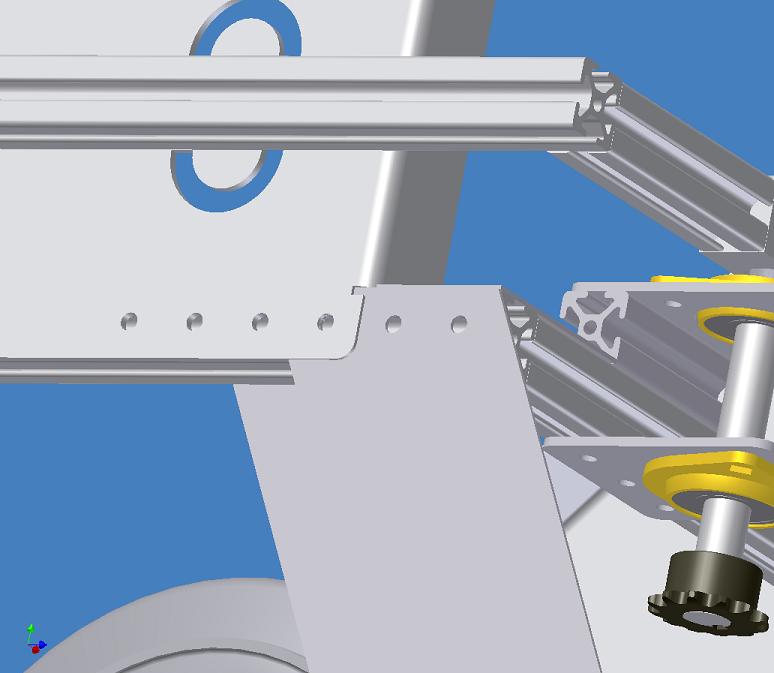
This is another part of the corral which holds the corral arms to the frame. Originally desiged using two flat pieces of 1/16 Al, DMP made it for us in folded 1/8 Al. Sweet... |
 |
This is the sweetest ass I've ever seen. Eat your heart out JLo! |
 |
I don't know what russel was thinking when he made the triangles on his towers so huge. They collide with the second level support plates! |
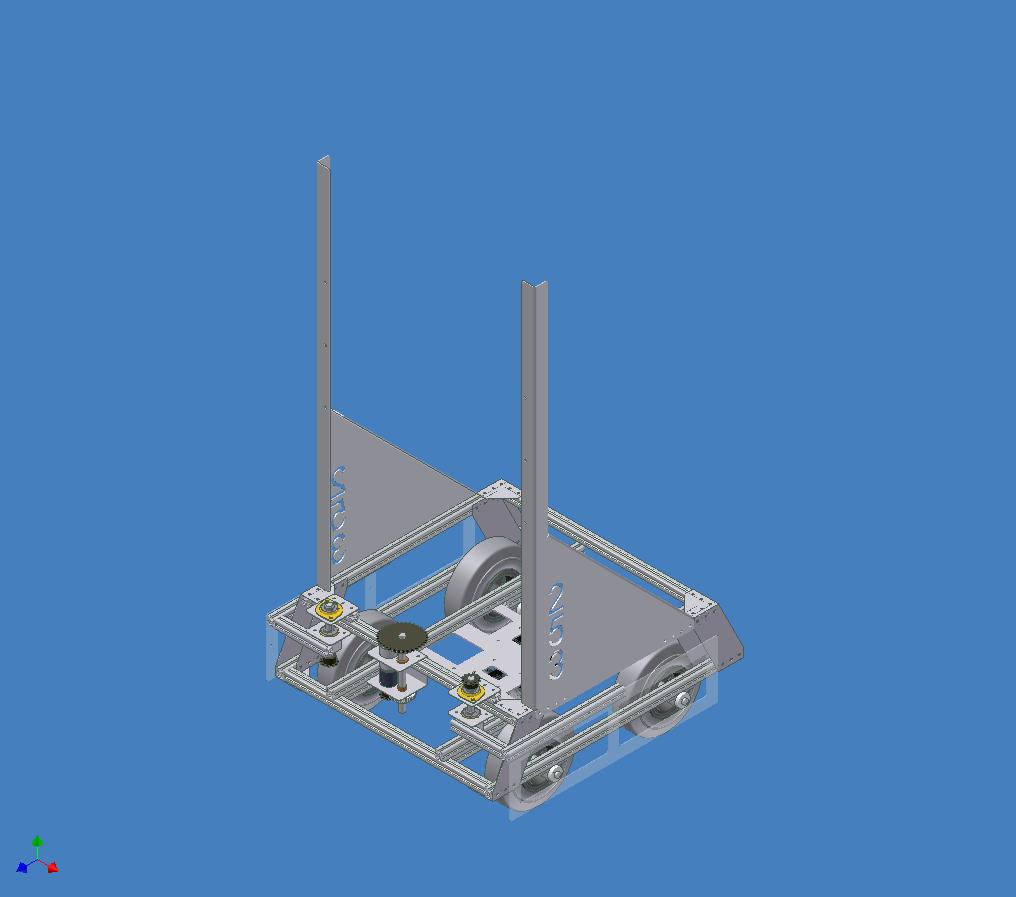 |
As of Feb 26, this is where the CAD stands. the real thing has a claw on those huge towers. This drawing is also missing some panels and the control system. Other than that though, this is pretty much what we look like. |
 |
Another creatation brought to life by DMP. I've been asking our PR/finance guy if we could get one of those ;). |
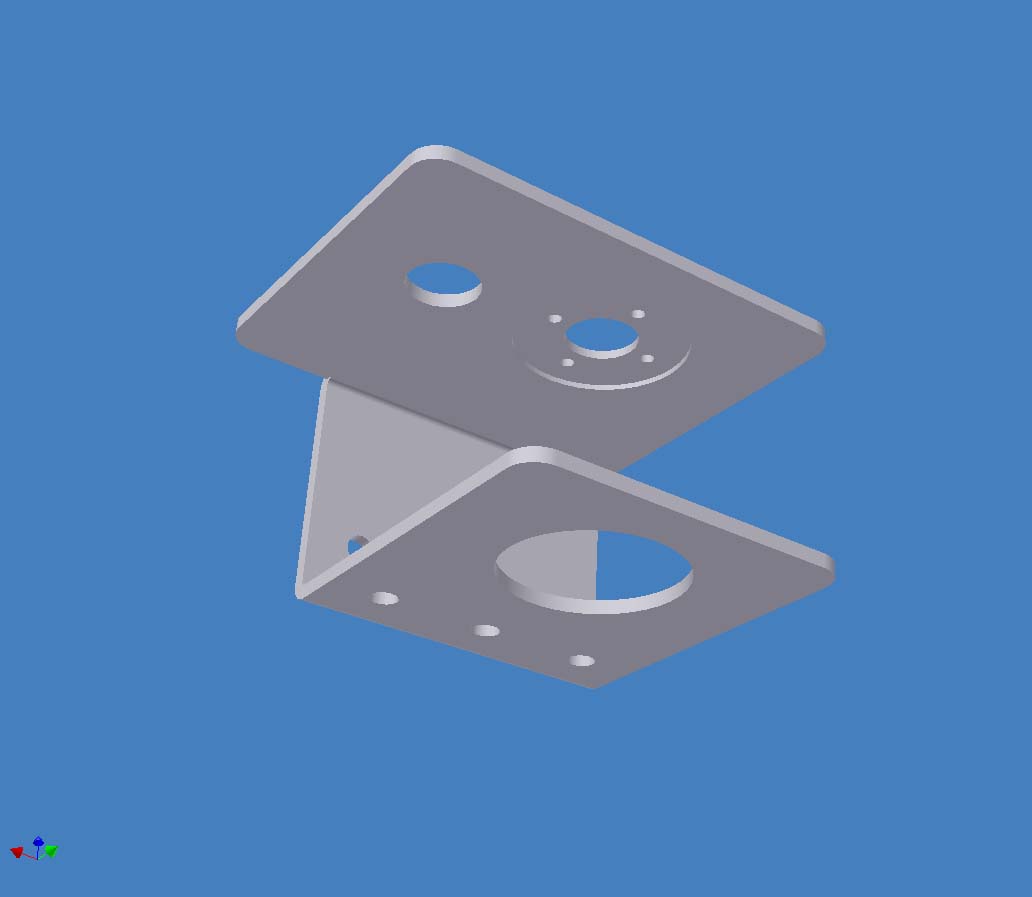 |
Double take. Gotta' love those seksi bends there. |
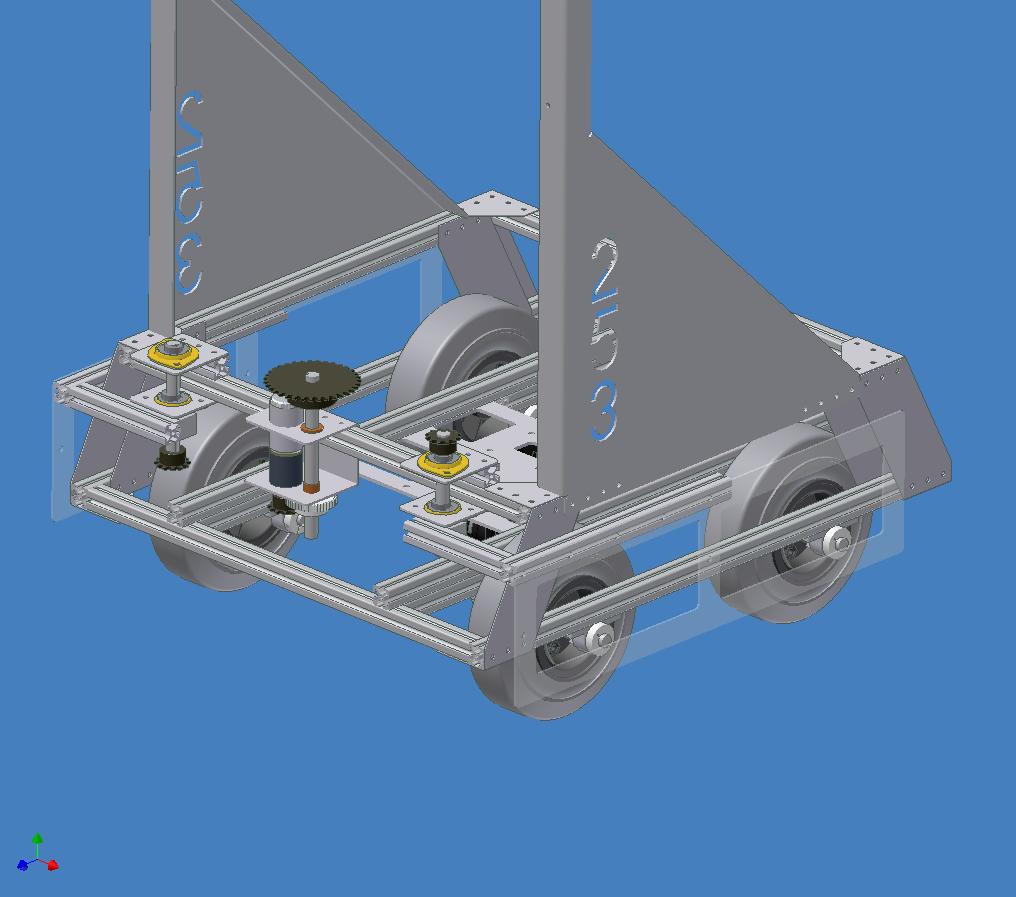 |
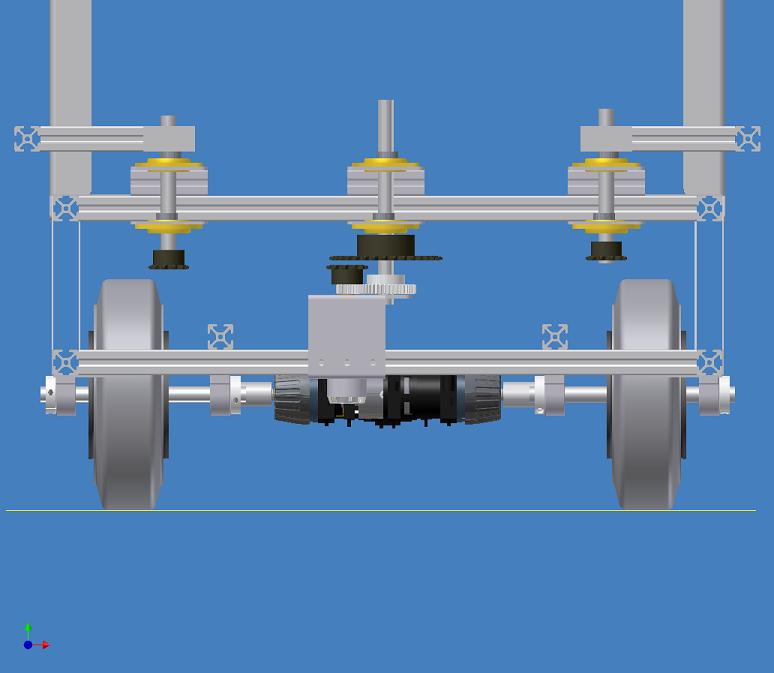
This is where most of it's at. The main part of the robot without those twin towers shooting up. |
| Outdated, but I thought it was pretty cool at the time; this shows that the globe mount has nearly perfect clearance as a matter of coincidence. | |
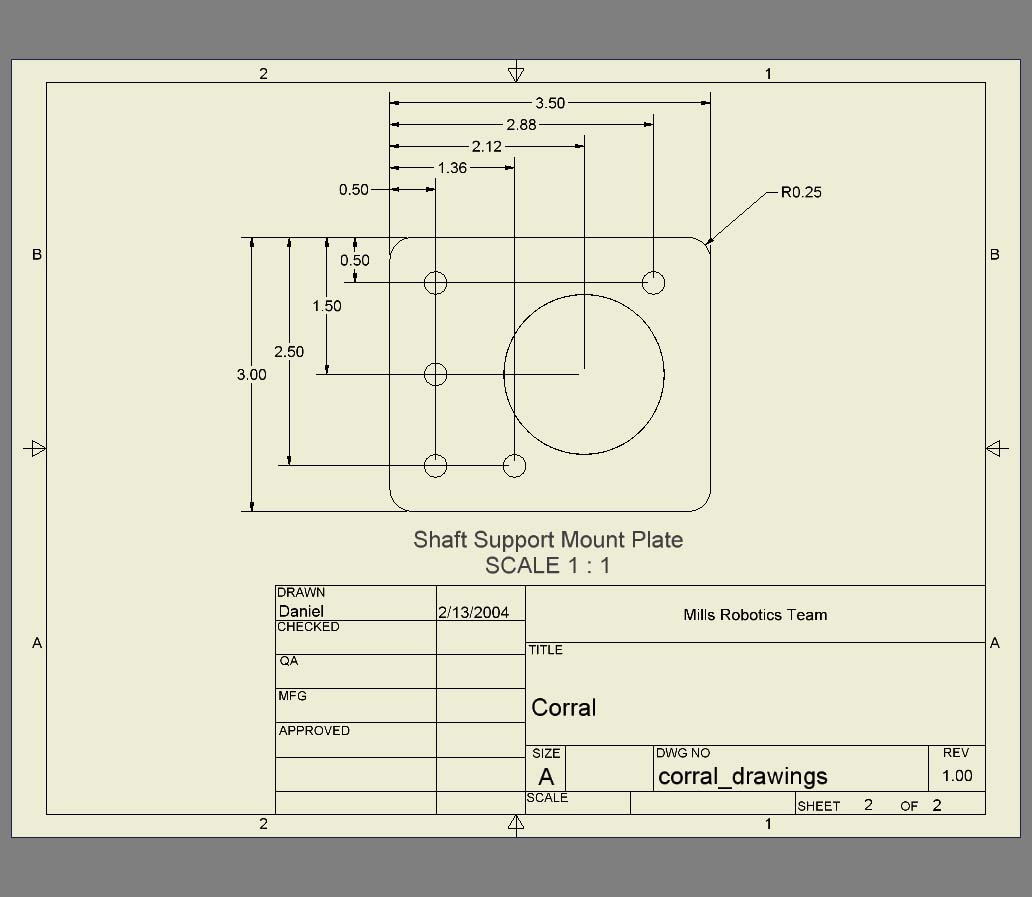 |
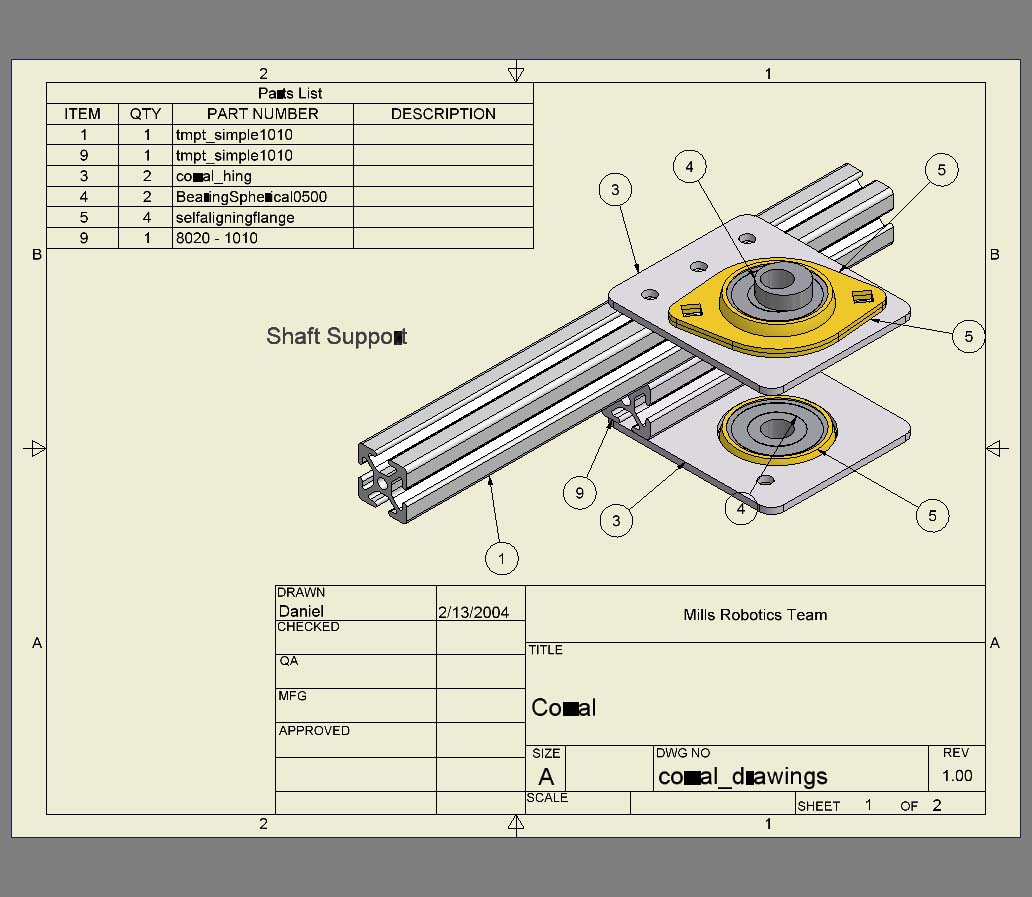
Here's the hole layout for the corral mount. I really hate publishing drawing files some times. I guess being on the cutting edge of 3d modeling does have its disadvantages. |
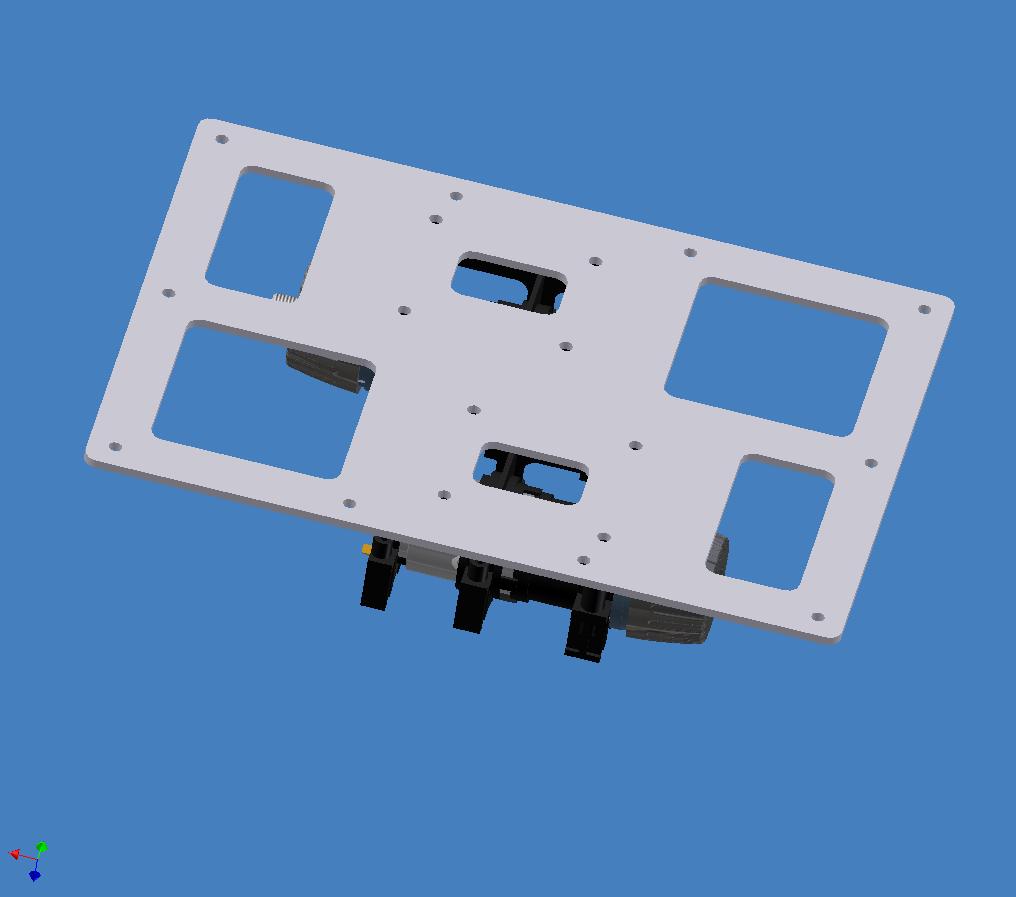 |
We're desperate to lose weight now. Here's a redesigned motor mount plate with serious swiss cheesing. |